2021年12月
1Arduino UNO/Nano主控板,下列引脚中既具有模拟信号输入功能,又具有数字信号输入功能的是?( )
A. 0
B. 9
C. 13
D. A0
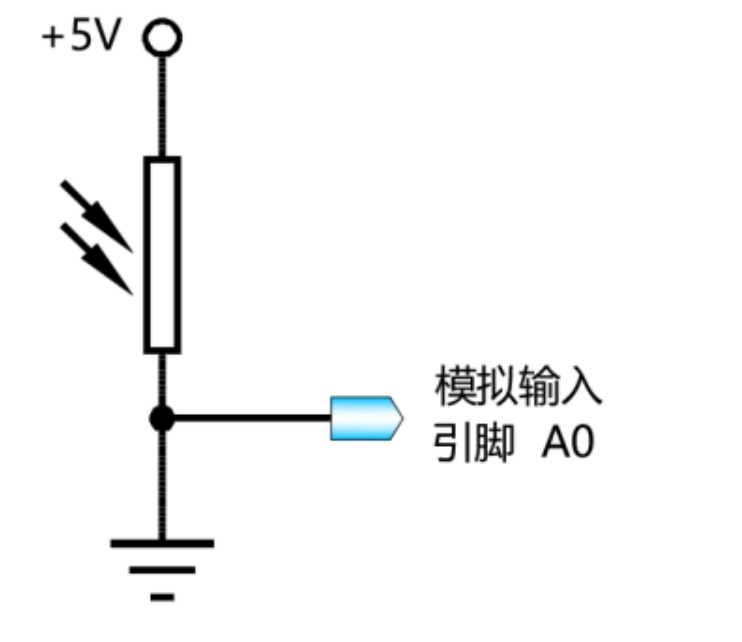
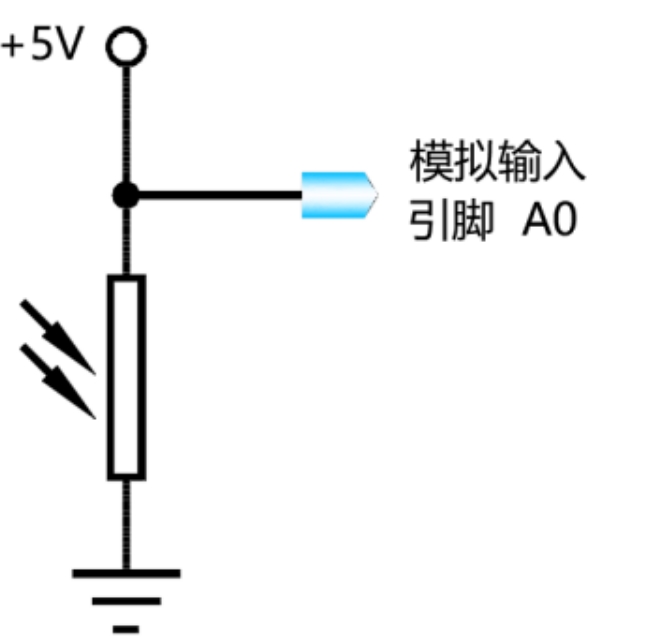
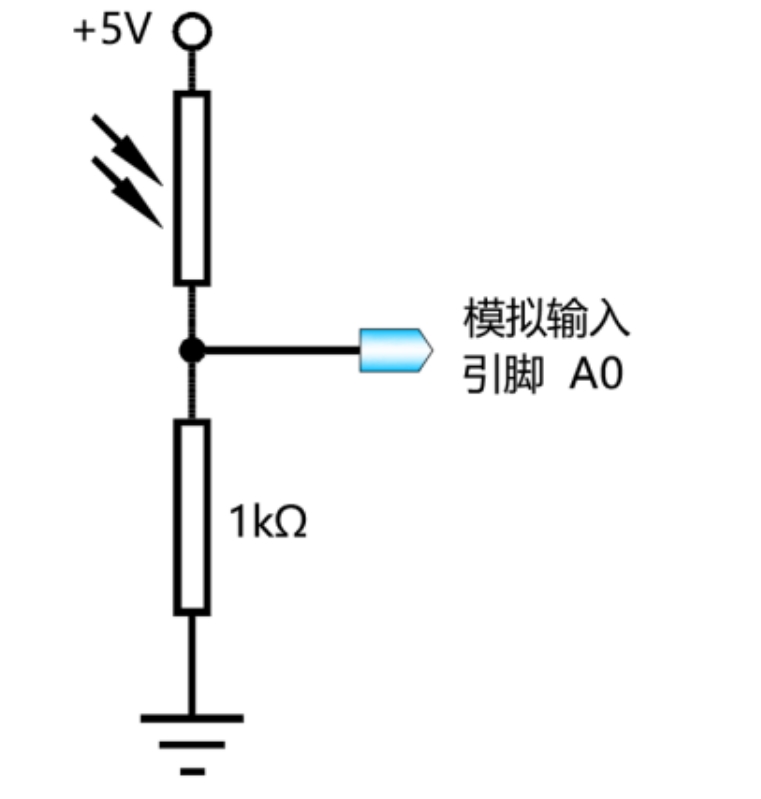
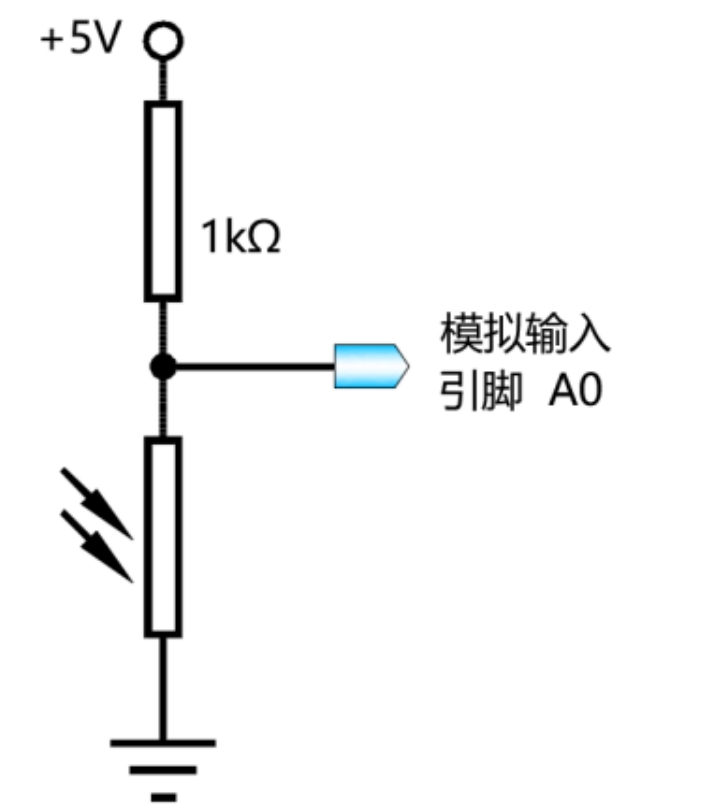
Arduino UNO/Nano主控板,通过光敏电阻控制LED灯的亮度,LED灯阳极和引脚3相连接。程序如下,下列电 路原理图中,当光照强度增强时,LED灯亮度降低的是?( )

对于条件表达式A和B,下列选项中,通常用于描述当A和B两个条件有一个条件成立时,整个条件就成立的 是?( )
A. A&&B
B. A||B
C. A%B
D. A==B
Arduino C语言中,前缀0b表示的数制是?( )
A. 二进制
B. 八进制
C. 十进制
D. 十六进制
5Arduino UNO/Nano主控板,通过红外IRremote类库接收红外数据,红外类库提供的成员函数resume()的功能 是?( )
A. 启动红外接收
B. 接收并解码红外数据
C. 清空缓存,接收下一个红外数据
D. 发送红外数据
Arduino UNO/Nano主控板,程序控制板载LED灯,程序如下,当程序运行时,LED灯的状态是?
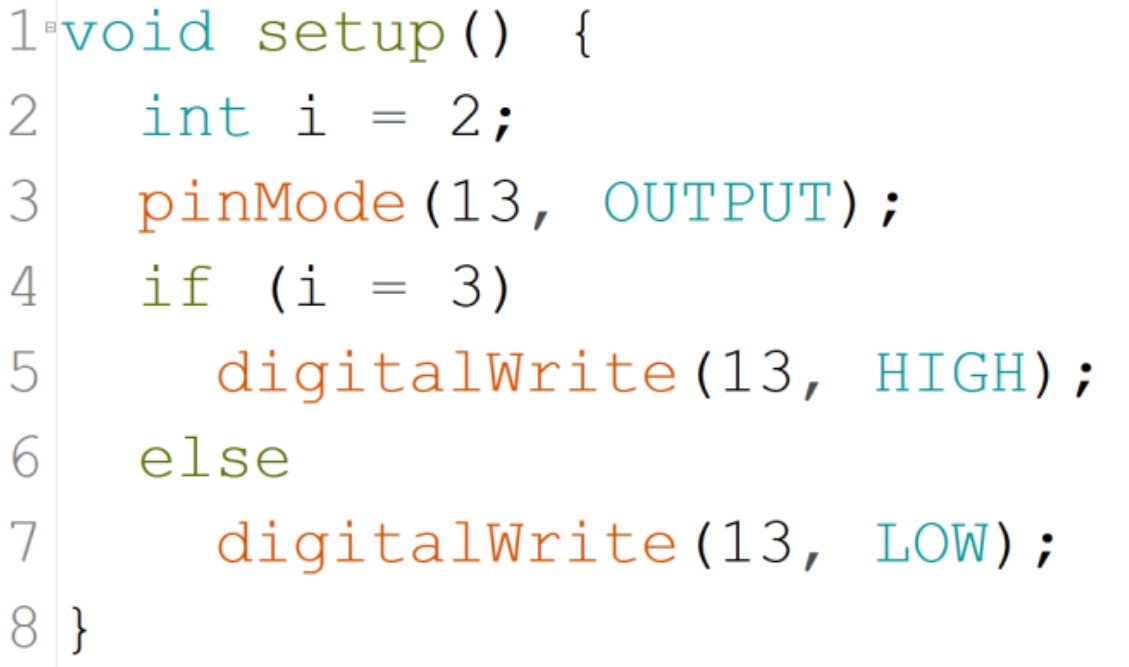
A. 点亮
B. 熄灭
C. 闪烁
D. 不确定
Arduino UNO/Nano主控板,程序analogWrite(5,255)所对应的占空比是?( )
A. 0%
B. 25%
C. 50%
D. 100%

A. 设置串口的波特率,数值越大,数据传送的速率越小。
B. 每秒传送9600个字节数据。
C. 每秒传送1200个字节数据。
D. 每秒传送9600个位数据。
Arduino UNO/Nano主控板,LED灯连接在D3引脚,下列选项中,可实现LED灯亮度渐变的是?( )
A. digitalRead(3)
B. digitalWrite(3)
C. analogWrite(3)
D. analogRead(3)
10Arduino UNO/Nano主控板,其ADC的精度是?( )
A. 2位
B. 8位
C. 10位
D. 16位
11Arduino UNO/Nano主控板,程序控制板载LED灯闪烁,程序如下,当程序运行时,板载LED灯闪烁的次数是? ( )
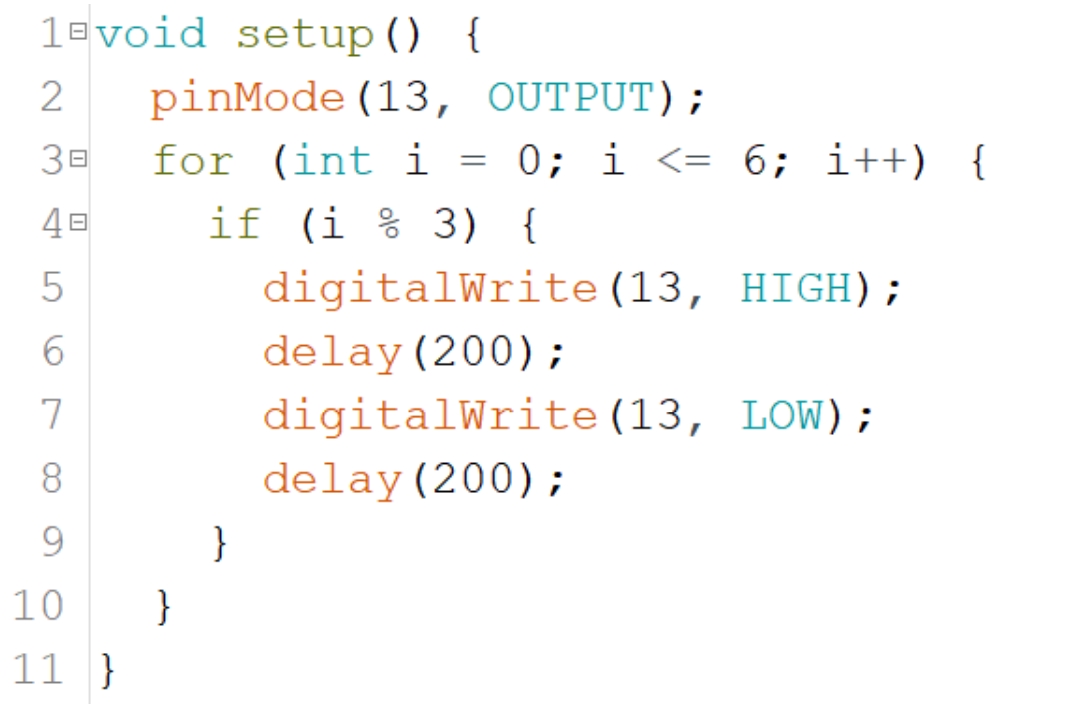
A. 2
B. 3
C. 4
D. 6
Arduino UNO/Nano主控板,读取按键开关的返回值,电路如下图所示,程序中[ ]内正确选项是?( )
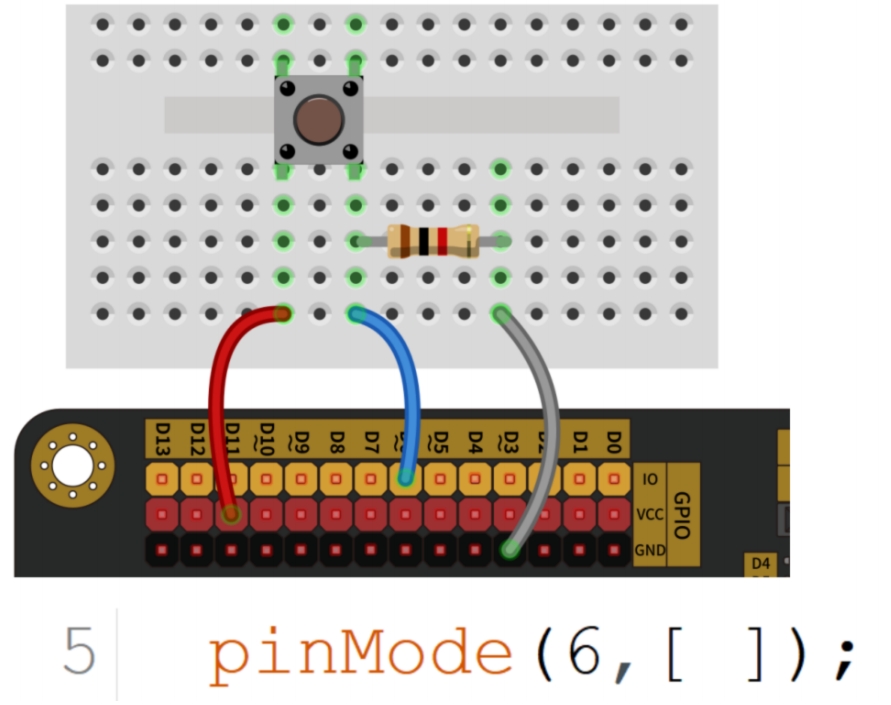
A. INPUT
B. OUTPUT
C. INPUT_PULLUP
D. INPUT_PULLDOWN
有关晶体三极管,下列说法不正确的是?( )
A. 晶体三极管根据构造,可以分为NPN和PNP两种类型。
B. 晶体三极管的三个引脚,分别为基极、集电极和发射极。
C. 晶体三极管由两个PN结构成。
D. 当NPN晶体三极管工作于开关状态时,高电平截止。
Arduino程序如下,该程序运行后在串口监视器显示的内容是?( )

A. 10110
B. 22
C. 26
D. 16
15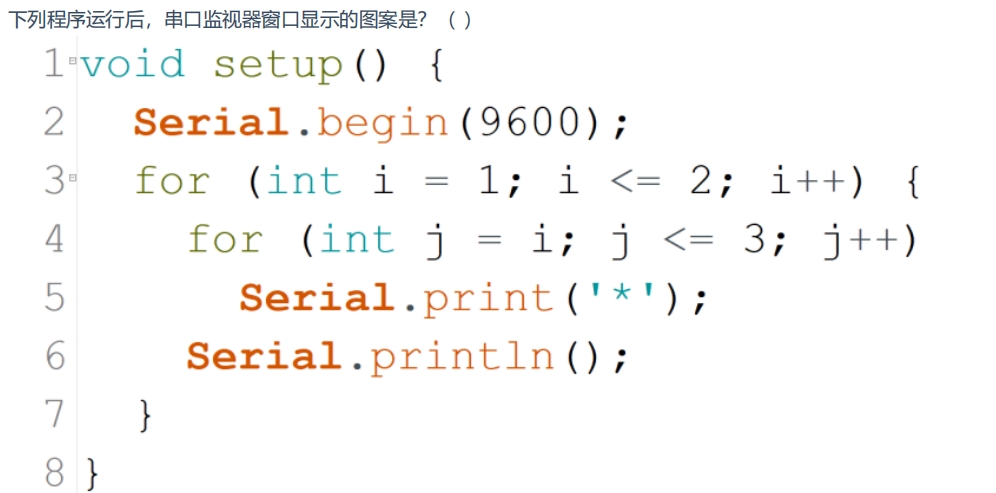
Arduino UNO/Nano主控板,Servo类库所提供的成员函数中, 用于控制舵机转动角度的是?( )
A. attach()
B. write()
C. map()
D. Servo
Arduino UNO/Nano主控板,通过程序控制LED灯亮灭,电路搭设示意和程序如下,程序运行后LED点亮,按键 开关按下后,LED灯熄灭。程序中[ ]中所对应的值先后是?( )
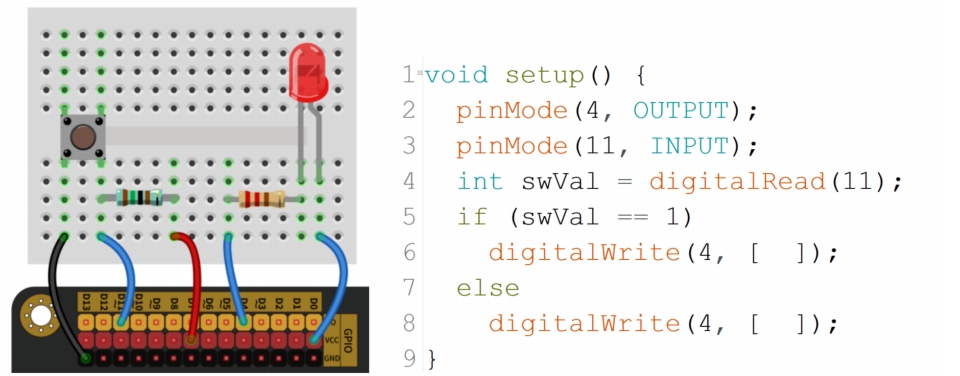 A. LOW HIGH B. HIGH LOW C. LOW LOW D. HIGH HIGH
A. LOW HIGH B. HIGH LOW C. LOW LOW D. HIGH HIGH
A. LOW HIGH
B. HIGH LOW
C. LOW LOW
D. HIGH HIGH
正常情况下,Arduino UNO/Nano主控板MCU的工作频率是?( )
A. 1MHz
B. 2MHz
C. 16MHz
D. 32MHz
有关Arduino C程序,下列说法不正确的是?( )
A. setup()函数中通常放置初始化程序。
B. loop()函数中通常放置主执行程序。
C. 程序运行时,首先运行setup()函数内的程序。
D. 如果没有初始化程序,setup()函数可以省略。
20Arduino C语言,下列有关continue语句,说法正确的是?( )
A. 其功能是继续程序的运行。
B. 其功能是终止当前的循环的运行,开始下一次循环运行。
C. 其功能是终止当前的循环的运行,跳转到循环体后续语句运行。
D. 终止当前程序的执行。
21下列说法正确的是? ( )
A. 电路搭设时,禁止带电插拔。
B. 电路搭设前,应尽可能消除身体所带的静电。
C. 电路搭设时,避免手直接与芯片引脚接触
D. 通电前,应该仔细检查电路,以避免出现短路。
程序的运行阶段,一般由如下几个步骤组成? ( )
下列选项中,有关闭环控制描述正确的是?( )
A. 闭环控制中会对输出结果进行检测。
B. 闭环控制中要计算实际输出结果和目标输出结果之间的偏差。
C. 闭环控制会将实际输出结果和目标输出结果间的偏差,反馈回输入端。
D. 导弹飞行的制导过程是闭环控制。
下列器件中,属于传感器的有? ( )
Arduino UNO/Nano主控板,Arduino C语言中,数字引脚模式设置函数pinMode()的参数有?( )
26占空比是指一个周期内高电平时间所占的比例。( )
delay()函数的功能是暂停程序运行指定的时间。( )
Arduino UNO/Nano主控板,Arduino C语言程序中整型数占用4个字节。( )
定义变量时,变量名的第一个字符不能是数字。( )
Arduino以开源的方式推广,我们可以在产品上任意使用Arduino的商标。( )