2023年6月
下图是三相反应式步进电机工作示意图,图示所对应的工作方式为?( )
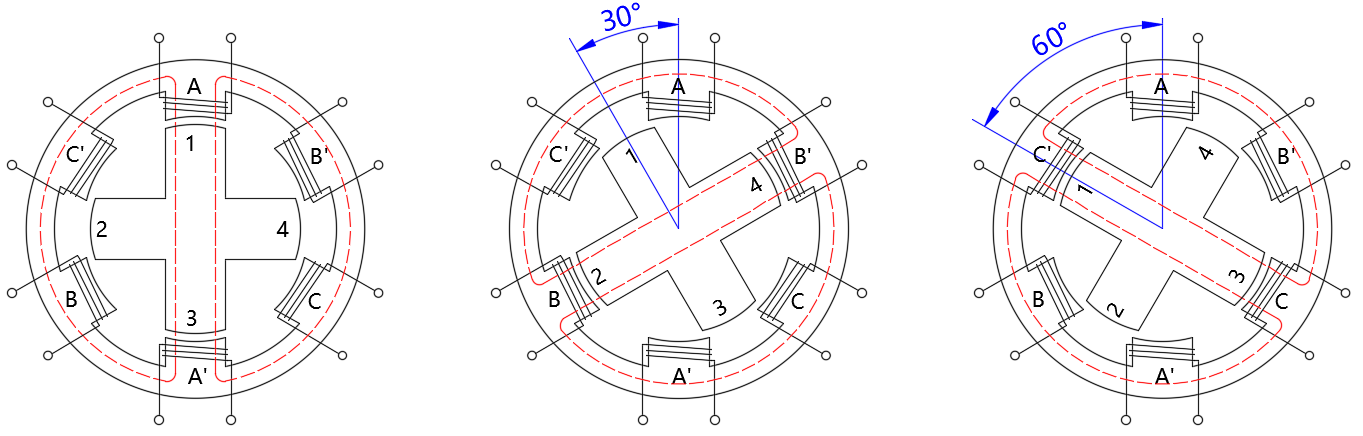
A. 三相单双三拍
B. 三相单三拍
C. 三相双三拍
D. 三相单双六拍
2.I2C串行通信有两根数据线,用于发送时钟信号的是?( )
A. SDA
B. SCL
C. TX
D. RX
3.ESP32主控板WiFi的连接方式如下图所示,该主控板的WiFi工作模块是?( )

A. 客户端
B. STA
C. AP
D. STA+AP
4.一台计算机连接到互联网,可完成网页浏览、邮件发送等任务,不同服务在应用层分别具有不同的?( )
A. IP地址
B. 传输层协议
C. 端口
D. 网络层协议
5.ESP32 for Arduino I2C类库的下列成员函数中,用于将从设备的地址加入到发送数据队列的成员函数是?( )
A. Wire.begin()
B. Wire.write()
C. Wire.beginTransmission()
D. Wire.endTransmission()
6.I2C串行通信,当总线空闲时,串行时钟线的电平是?( )
A. 低电平
B. 高电平
C. 上升沿
D. 下降沿
7.HTML文档中,下列选项中,用于标记网页开始的标签是?( )
A. <title>
B. <head>
C. <body>
D. <html>
8.步进电机AccelStepper类库的成员函数中,成员函数move()功能描述正确的是?( )
A. 设定步进电机运动到相对当前位置的脉冲数量
B. 设定步进电机运动到相对初始基准位置的脉冲数量
C. 启动步进电机恒速转动
D. 启动步进电机以设定的加速度和最大速度转动
9.下列选项中,HTTP请求报文头部的结束符是?( )
A. /r
B. /n
C. /r/n
D. /n/r
10.IPv4地址的段数及长度分别是?( )
A. 4 32
B. 4 128
C. 8 32
D. 8 128
11.ESP32 for Arduino SPI类库的下列成员函数中,用于发送数据的成员函数是?( )
A. SPI.begin()
B. SPI.beginTransaction()
C. SPI.endTransaction()
D. SPI.transfer()
12.两块ESP32主控板A和B通过WiFi互联,A为AP,其ssid为“ABC”,password为“12345678”。下列选项中,能实现B以STA模式连接到A的程序是?( )
A. WiFi.softAP("ABC","12345678");
B. WiFi.softAPConnect("ABC","12345678");
C. WiFi.begin("ABC","12345678");
D. WiFiServer.begin("ABC","12345678");
13.一位数码管和74HC595芯片连接如下图所示,数码管显示字符为“b”,下列选项中正确的程序是?( )

A
B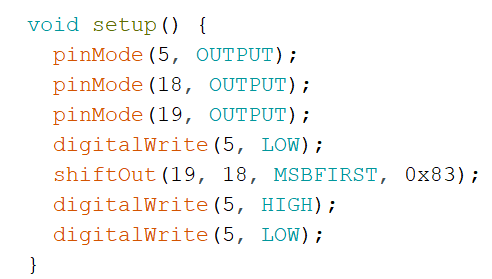
C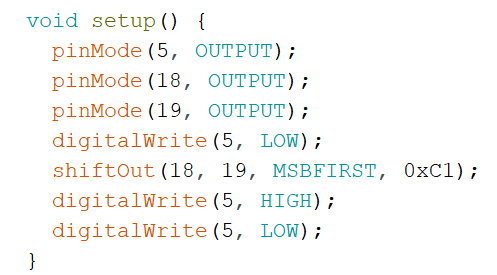
D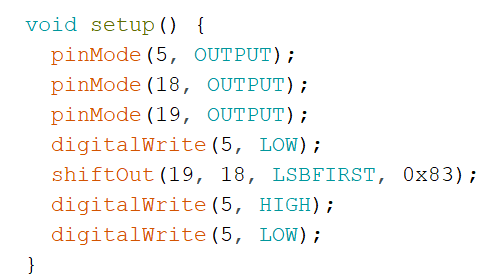
14.TCP/IP四层模型中,HTTP协议属于?( )
A. 应用层
B. 传输层
C. 网络层
D. 网络接口层
15.SPI通信,从机向主机发送数据的数据线是?( )
A. SCLK
B. MOSI
C. MISO
D. SDA
16.ESP32 for Arduino 提供的WiFi类库的成员函数中,成员函数softAPIP()功能描述正确的是?( )
A. 返回softAP的IP地址
B. 设定softAP的IP地址
C. 设定连接到softAP上的STA的IP地址
D. 创建一个AP,并设定AP的IP地址
17.ESP32 for Arduino I2C类库的成员函数available(),下列描述正确的是?( )
A. 从接收缓冲区中接收数据
B. 返回接收缓冲区的字节数
C. 将从设备的地址加入到发送数据队列
D. 将数据队列发送给从设备
18.MPU6050姿态传感器所包含的功能单元中,用于获取角速度数据的是?( )
A. 加速度计
B. 陀螺仪
C. 数字运动处理器
D. 磁力计
19.ESP32主控板通过I2C协议读取姿态传感器MPU6050的原始姿态数据,MPU6050的地址为0x68,X轴加速度分量的首地址为0x3B,需要读取X/Y/Z轴的加速度数据、角速度数据和温度数据,下列程序正确的是?( )
A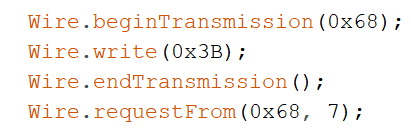
B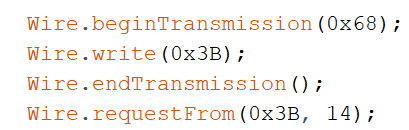
C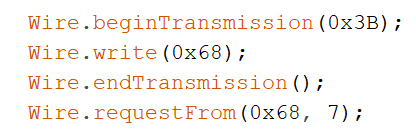
D
20.下列选项中,关于命令ipconfig,说法正确的是?( )
A. 列出当前可用的网络连接
B. 查看当前计算机配置
C. 检查计算机是否连通到外部WiFi
D. 查看当前计算机的IP配置
21.通过MPU6050姿态传感器获取数据可以解析出姿态角,姿态角包含有?( )
22.下列所示的PID控制器选项中,常用的控制器有?( )
23.TCP/IP四层模型中,传输层主要使用的协议有?( )
24.关于I2C通信,下面说法正确的是?( )
A. I2C通信空闲时,数据线和时钟线总是处于高电平输出状态
B. I2C通信是串行通信
C. I2C通信中从设备都有一个唯一的地址
D. I2C通信是一种半双工通信方式
25.通常情况下,在浏览器的输入框中,输入相应内容,可打开指定网页的有?( )
26.PID控制器中,P控制是基于偏差的控制。( )
A. 正确
B. 错误
27.TCP/IP协议是互联网一系列协议的统称。( )
A. 正确
B. 错误
28.MPU6050姿态传感器和主控板通过SPI协议进行数据通信。( )
A. 正确
B. 错误
29.步进电机一般采用脉冲控制,其转动速度与脉冲频率成正比。( )
A. 正确
B. 错误
30.网页浏览时,本地计算机是客户端。( )
A. 正确
B. 错误