2024年6月
1、
如图,这是飞机起飞时的机翼示意图,下列说法正确的是?( )
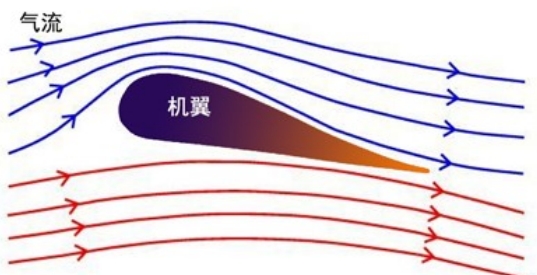
A. 机翼上侧所受的气压为0
B. 机翼受到向下的力的作用
C. 机翼下侧所受的气压为0
D. 机翼上侧所受的气压小于下侧
图中是苏颂等人发明的木构水运仪像台,它的作用是?( )

A. 灌溉农田
B. 算数
C. 观测天文
D. 计时
以下装置两轮转向相同的是?( ) |
A. 皮带交叉传动装置
B. 链传动装置
C. 垂直啮合的齿轮
D. 蜗轮蜗杆机构
如图,该机构中主动摆杆是指?( )
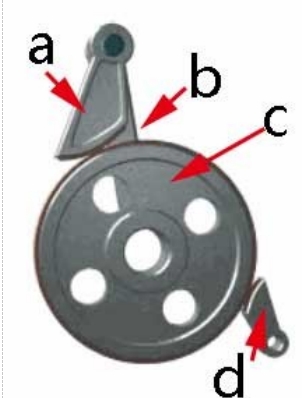
a
b
c
d
一节干电池的电压约为?( ) |
A. 1.5V
B. 1000v
C. 36V
D. 220V
关于电动机的能量转化说法正确的是?( ) |
A. 把机械能转化为电能
B. 把动能转化为势能
C. 把电能转化为机械能
D. 把势能转化为动能
关于凸轮机构,下列说法正确的是?( ) |
A. 从动件的运动规律取决于凸轮的轮廓曲线
B. 从动件的运动周期一定,凸轮的运动周期相同
C. 从动件只能摆动不能直动
D. 从动件只有尖顶从动件一种类型
如图,曲柄滑块机构中哪个是滑块?( )
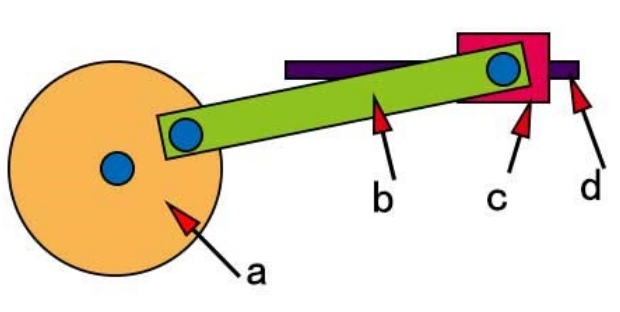
a
b
c
d
如图,关于该机构,下列说法正确的是?( )
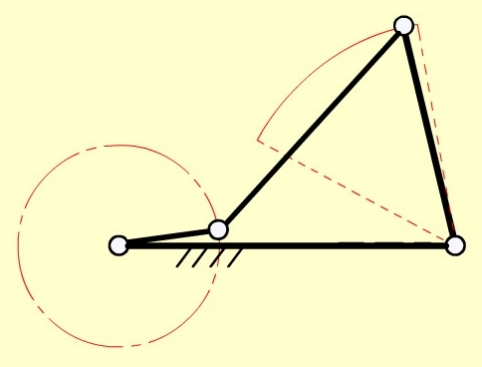
A. 这是曲柄摇杆机构
B. 这是双摇杆机构
C. 这是双曲柄机构
D. 这是曲柄滑块机构
10、
滑杆机构中回转体做什么动作?( ) |
A. 沿着轨道来回滑动
B. 回转运动
C. 静止不动
D. 左右摇摆
如图,下列说法正确的是?( )
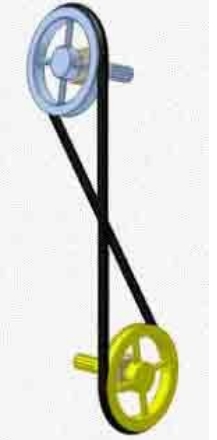
A. 这是皮带平行传动
B. 这是皮带半交叉传动
C. 这是齿轮传动
D. 这是链传动
如图,该凸轮机构的锁合方式为?( )

A. 重力锁和
B. 弹力锁合
C. 使用槽凸轮机构几何锁合
D. 使用共轭凸轮机构的几何锁合
如图,关于该场景说法正确的是?( )

A. 将滑动摩擦变为了滚动摩擦,用来增大摩擦力
B. 将滑动摩擦变为了滚动摩擦,用来减小摩擦力
C. 将滚动摩擦变为了静摩擦,用来增大摩擦力
D. 将滚动摩擦变为滑动摩擦,用来增大摩擦力
关于齿轮平行啮合,下列说法正确的是?( ) |
A. 两个齿轮转动方向相同
B. 大齿轮比小齿轮转速快
C. 只能起加速作用
D. 适合近距离传动
机器人的控制系统相当于人类的?( ) |
A. 大脑
B. 皮肤
C. 四肢
D. 心脏
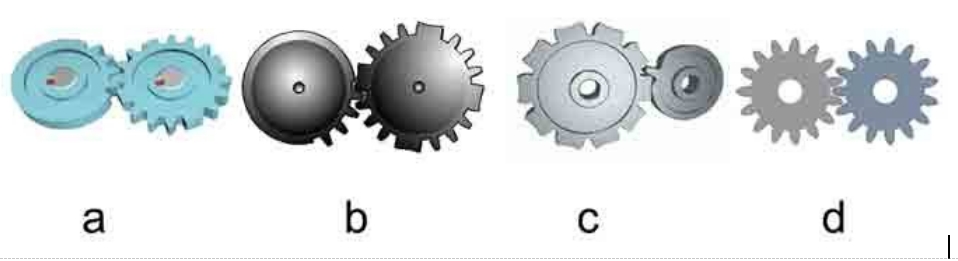
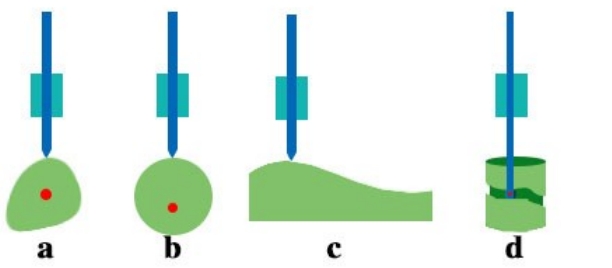
如图,采用了滚子型从动件的是?( )
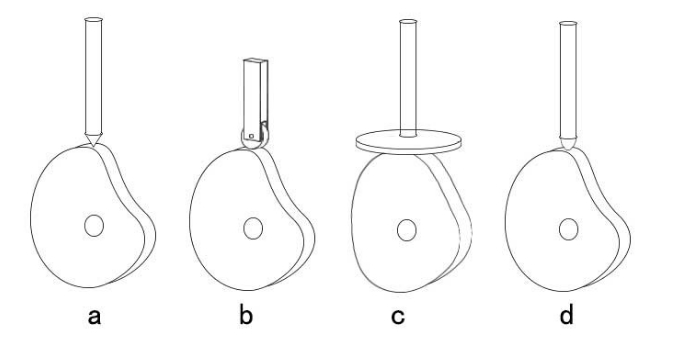
a
b
c
d
17\
如图,下列哪个选项是单动式棘轮机构?( )
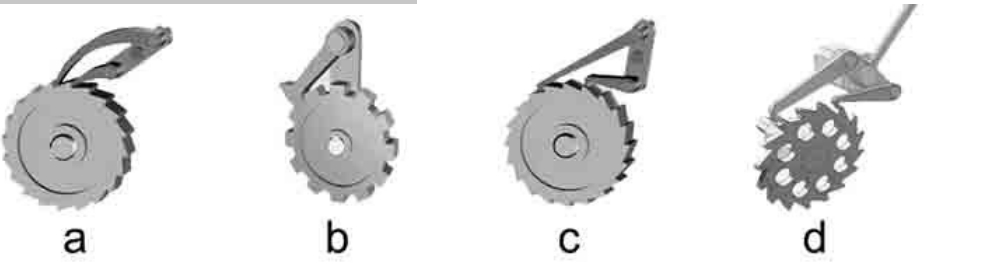
a
b
c
d
凸轮机构按照凸轮的形状分类不包括?( ) |
A. 盘形凸轮
B. 移动型凸轮
C. 圆柱凸轮
D. 圆形凸轮
如图关于该机构,下列说法正确的是?( )
A. 这是凸轮机构
B. 这是不完全齿轮机构
C. 这是棘轮机构
D. b是主动件
典型棘轮机构不包括?( ) |
A. 主动摆杆
B. 止回摆杆
C. 棘轮
D. 止回棘爪
以下要求零件必须在同一平面内连接的选项为?( ) |
A. 链传动
B. 皮带传动
C. 齿轮传动
D. 蜗轮蜗杆
关于重力说法错误的是?( ) |
A. 同一个地方一个西瓜的重力大于一粒芝麻的重力
B. 很轻的物体是没有重力的
C. 重力是垂直于水平面竖直向下的
D. 重力的大小与物体的质量有关
23\
关于棘轮机构,下列说法正确的是?( ) |
A. 棘轮机构只能单向运动
B. 棘轮机构只能双向运动
C. 棘轮机构可以双向运动
D. 棘轮机构只能有一个主动棘爪
24\
如图,该机构中回转体做什么动作?( )
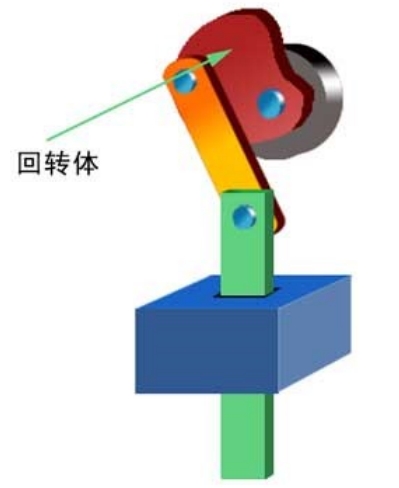
A. 在既定的轨道上滑动
B. 摇摆运动
C. 上下直动
D. 回转运动
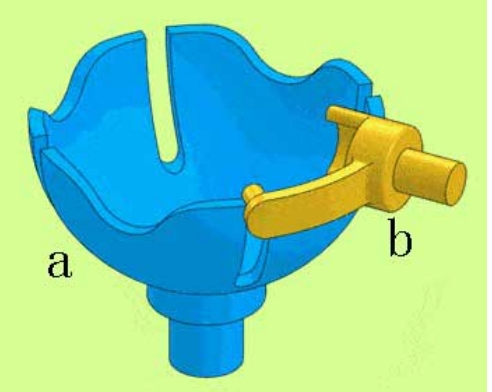
如图,关于该机构,下列说法正确的是?( )
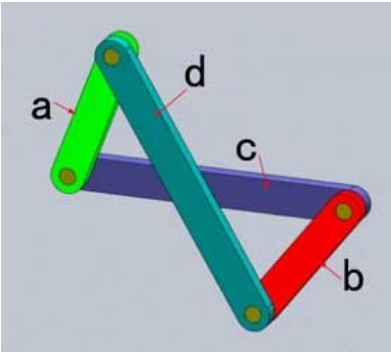
A. a做回转运动
B. b做摇摆运动
C. c做回转运动
D. d做回转运动
如图,下列哪个是军用机器人?( )
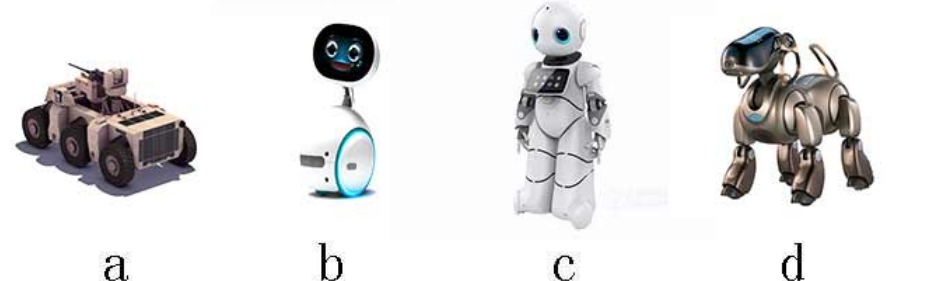
a
b
c
d
机器人的机械腿一般会用到下列哪个机构?( ) |
A. 凸轮机构
B. 棘轮机构
C. 槽轮机构
D. 连杆机构
一个步行机器人,用左右两个电机分别控制左右腿,左侧电机转速是100rpm,右侧电机转速是0rpm,则此机器人?( ) |
A. 原地右转
B. 向右前方转向
C. 原地左转
D. 原地不动
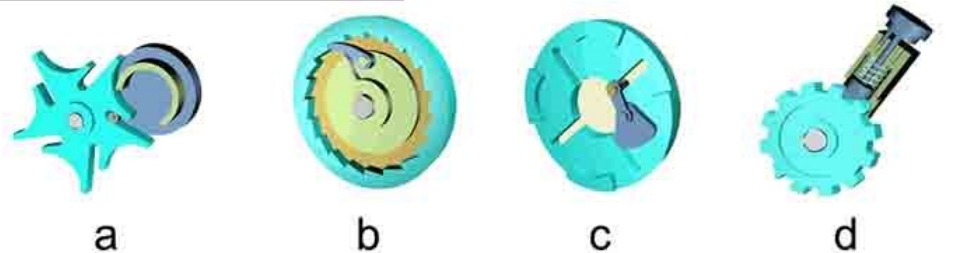
如图,下列哪个不是间歇运动机构?( )
a
b
c
d
如图,下列哪个是移动型凸轮机构?( )
a
b
c
d
31\
如图,下列哪两个选项是棘轮机构?( )
如图,小汽车在坡上停留的过程中,受到的力包括哪三项?( )

以下物品含有齿轮的两项是?( ) |
如图,下列设计为了增大摩擦力的有哪些?( )

关于摩擦力说法正确的两项是?( ) |
A. 滑动摩擦力的大小与接触面的粗糙程度有关
B. 滑动摩擦力的大小与接触面的粗糙程度无关
C. 两个物体不接触也能产生摩擦力
D. 产生摩擦力的两个物体一定是相互接触的
36\
自行车采用了链传动。( )
37\能量之间可以相互转化。( )
恐怖谷理论指的是机器人天生害怕人类。( )
任何机械都不省功。( )
链传动中链轮的转向可以相同也可以相反。( )
齿轮传动更适合近距离传动。( )
皮带传动容易出现打滑现象。( )
所有的机器人都有机械手臂。( )
两个物体接触面越光滑摩擦力越大。( )
想要实现机械自转的同时绕一个旋转中心公转,可以采用“行星齿轮”。( )